AI全景巡检机器人、360全景影像分析以及AI全景巡检与BIM比对在提高巡检效率方面发挥着重要作用。它们的工作机制及提高巡检效率的方式如下:
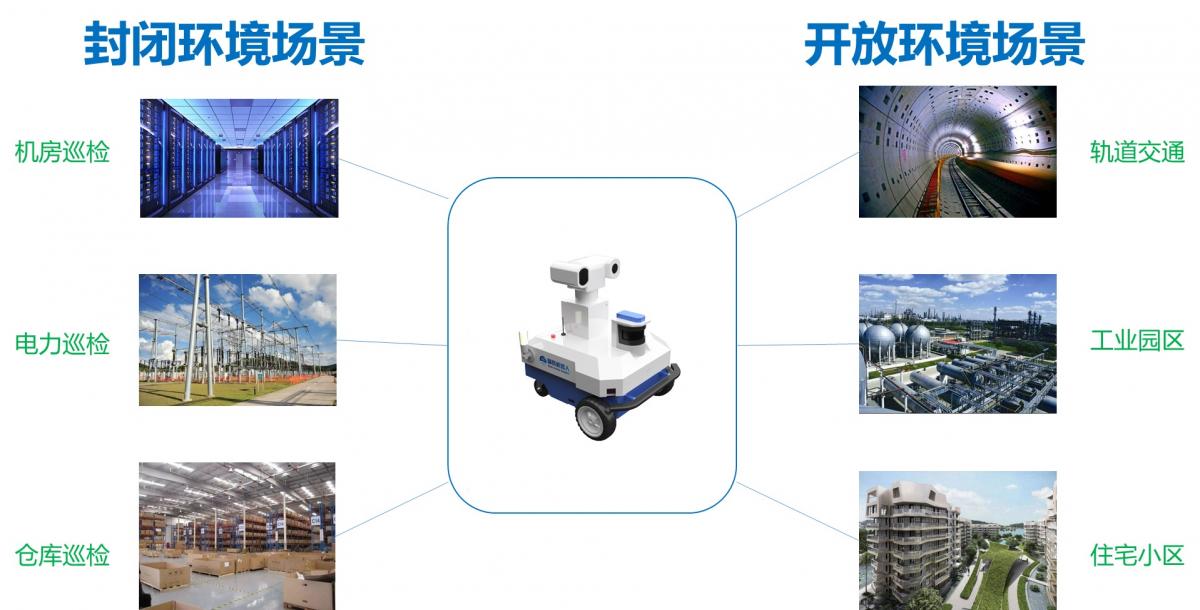
一、AI全景巡检机器人的工作机制及提高巡检效率的方式
工作机制:
- 自主导航:AI全景巡检机器人利用先进的导航技术(如SLAM技术)进行自主路径规划,无需人工干预即可到达巡检点。这大大减少了巡检过程中的人力投入和时间成本。
- 数据采集:机器人通过搭载的多种传感器(如高清摄像头、红外线传感器、声音传感器等)实时采集巡检现场的数据,包括图像、声音、温度等信息。
- 智能识别:结合AI图像识别技术,机器人能够自动识别巡检现场的设备状态、安全隐患等问题,并进行初步判断和分析。
- 数据传输:机器人将采集到的数据实时传输到后台管理系统,供管理人员进行进一步分析和处理。
提高巡检效率的方式:
- 自动化巡检:无需人工干预,机器人可以24小时不间断地进行巡检,大大提高了巡检的频次和覆盖面。
- 精准识别:通过AI图像识别技术,机器人能够精准识别巡检现场的问题,减少误报和漏报的情况,提高巡检的准确性。
- 数据实时传输:机器人将采集到的数据实时传输到后台管理系统,管理人员可以即时了解巡检情况,快速响应和处理问题。
二、360全景影像分析的工作机制及提高巡检效率的方式
工作机制:
- 全景拍摄:通过安装在巡检现场的360度全景摄像头,实时捕捉巡检现场的全景影像。
- 图像处理:控制主机对摄像头拍摄的图像进行处理,包括拼接和矫正,还原巡检现场的真实图像。
- 智能分析:结合AI图像识别技术,对处理后的图像进行智能分析,识别巡检现场的问题和安全隐患。
提高巡检效率的方式:
- 全面覆盖:360度全景摄像头能够覆盖巡检现场的所有角落,避免监控盲区,提高巡检的全面性。
- 高清画质:高清摄像头能够清晰捕捉巡检现场的细节,为智能分析提供高质量的数据支持。
- 快速响应:通过智能分析技术,可以即时发现巡检现场的问题并发出预警,帮助管理人员快速响应和处理。
三、AI全景巡检与BIM比对的工作机制及提高巡检效率的方式
工作机制:
- 数据融合:将AI全景巡检机器人采集到的数据与BIM模型数据进行融合,构建更加完整、准确的建筑信息模型。
- 比对分析:将融合后的数据与BIM模型中的设计参数进行比对分析,识别巡检现场与设计图纸之间的差异和问题。
提高巡检效率的方式:
- 精准定位:通过比对分析技术,可以精准定位巡检现场的问题所在,为后续的维修和改造提供有力支持。
- 优化设计:比对分析结果可以帮助设计人员优化设计方案,提高建筑设计的合理性和科学性。
- 施工管理:通过实时比对巡检数据与BIM模型数据,可以及时发现施工过程中的问题并采取相应的管理措施,提高施工质量和效率。






 客服
客服